système de chargement et de déchargement de sacs de camion
Le système de chargement et de déchargement de sacs de camion est l'un des systèmes de chargement de camion à bras robotisé en ligne, Industries applicables :
1. Ciment/matériaux de construction : sacs de ciment de 50 kg, robot 6 axes à grande charge + ventouse à vide, 600-2000 sacs/heure
2. Engrais/aliments : sacs de 25 kg à 40 kg, robot de charge moyenne + pince
3. Aliments/boissons/en boîte, en bouteille : robot BLMC + pince
4. Sacs chimiques/plastiques/tonnes, barils : robot portique robuste + élingue
5. Système de chargement et de déchargement de sacs de sel industriels pour camions
Le système de chargement par bras robotisé est un équipement logistique automatisé qui utilise des robots industriels, une vision intelligente et des systèmes de convoyage pour assurer des opérations de chargement efficaces et précises. Largement utilisé dans les secteurs du ciment, des engrais, de l'alimentation animale, de l'agroalimentaire et des produits chimiques, il est particulièrement adapté au chargement d'articles en sacs, en boîtes ou de formes régulières.
I. Composition du système
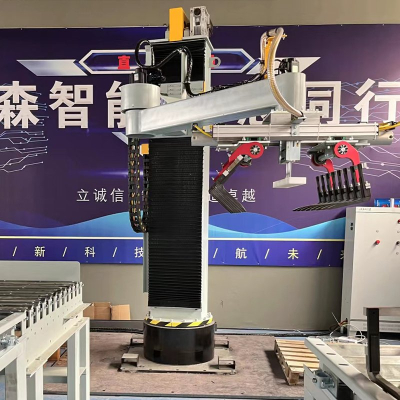
(1) Bras robotisé (robot industriel)
Type : utilise principalement un robot articulé à 4 axes (tel que le BS-180-3100) (scénario de charge légère à grande vitesse).
Charge : Sélectionnez en fonction du poids des marchandises (par exemple, les sacs de ciment pèsent généralement 50 kg/sac et un robot avec une charge ≥ 120 kg est requis).
Effecteur final :
Ventouse à vide : adaptée aux matériaux en sacs plats (tels que le ciment, la farine).
Pince/pince : utilisée pour les articles en boîte ou irréguliers.
Dispositif d'aspiration magnétique : scénario d'emballage métallique.
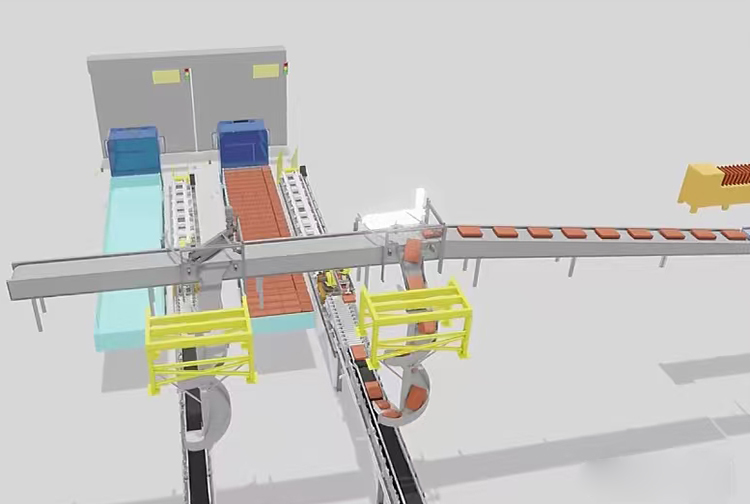
2) Système de transport
Convoyeur d'alimentation : convoyeur à bande, à rouleaux ou à chaîne, qui transporte les marchandises jusqu'à la zone de travail du bras robotisé.
Déviateur (facultatif) : trie plusieurs variétés de marchandises.
Module de pesage/inspection : assure que le poids ou l'apparence de chaque pièce de cargaison est qualifié.
(3) Système de positionnement visuel
Caméra 3D/scanner laser : identifie la taille du chariot, l'état d'empilement de la cargaison et la position du véhicule.
Algorithme : génère le chemin d'empilement optimal grâce à l'analyse du nuage de points et prend en charge l'ajustement dynamique (tel que le mouvement du véhicule ou le décalage de la cargaison).
(4) Système de contrôle
PLC (Siemens, Mitsubishi) : coordonne le bras du robot, la bande transporteuse et le capteur.
Interface homme-machine (IHM) : fournit un panneau de commande et prend en charge la commutation de mode manuel/automatique.
Docking de données : peut être connecté à WMS (système de gestion d'entrepôt) ou TMS (système de gestion du transport).
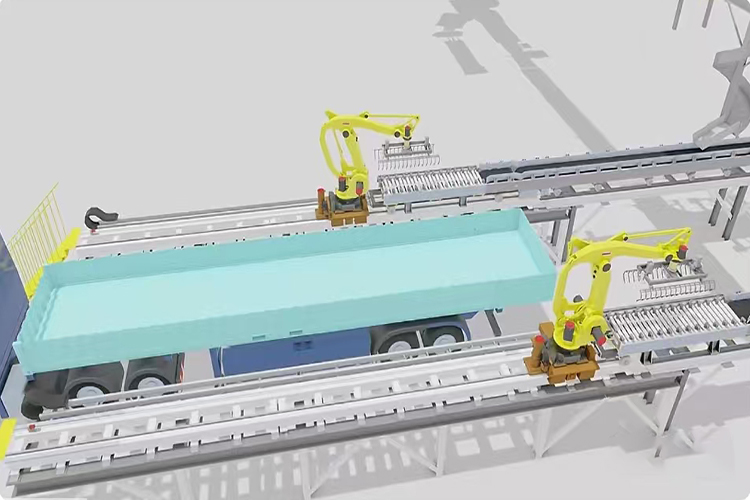
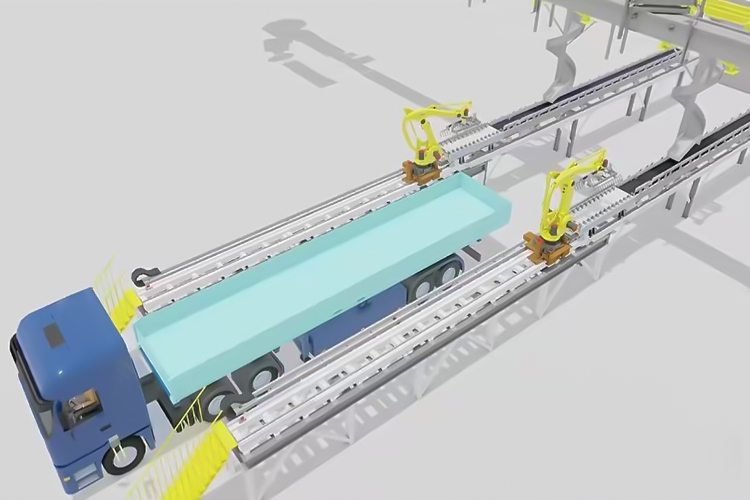
II. Flux de travail
1. Chargement de la cargaison : le convoyeur transporte la cargaison jusqu'à la station de saisie du bras robotisé.
2. Positionnement du véhicule : Le système visuel scanne la taille du chariot et l'état de chargement actuel.
3. Planification du chemin : le système calcule la séquence optimale de saisie et d'empilement (comme l'empilement décalé pour éviter l'effondrement).
4. Saisie et placement : Le bras du robot termine le chargement selon le chemin prévu et ajuste sa posture en temps réel.
5. Retour d'information sur l'achèvement : Après le chargement, le système envoie un signal et le véhicule démarre.
III. Secteurs concernés
1. Ciment/matériaux de construction : sacs de ciment de 50 kg, robot 6 axes à grande charge + ventouse à vide, 600-2000 sacs/heure
2. Engrais/aliments : sacs de 25 kg à 40 kg, robot de charge moyenne + pince
3. Aliments/boissons/en boîte, en bouteille : robot BLMC + pince |
4. Sacs chimiques/plastiques/tonnes, barils : robot portique robuste + élingue
5. Système de chargement et de déchargement de sacs de sel industriels pour camions
IV. Recommandations de sélection
Environnement à forte poussière (comme les cimenteries) : choisissez un robot anti-poussière + un système de dépoussiérage.
Marchandises lourdes (comme les sacs de tonnes) : pensez au robot portique
Exigences de haute précision (telles que les boîtes à médicaments) : avec système de vision 3D haute résolution.