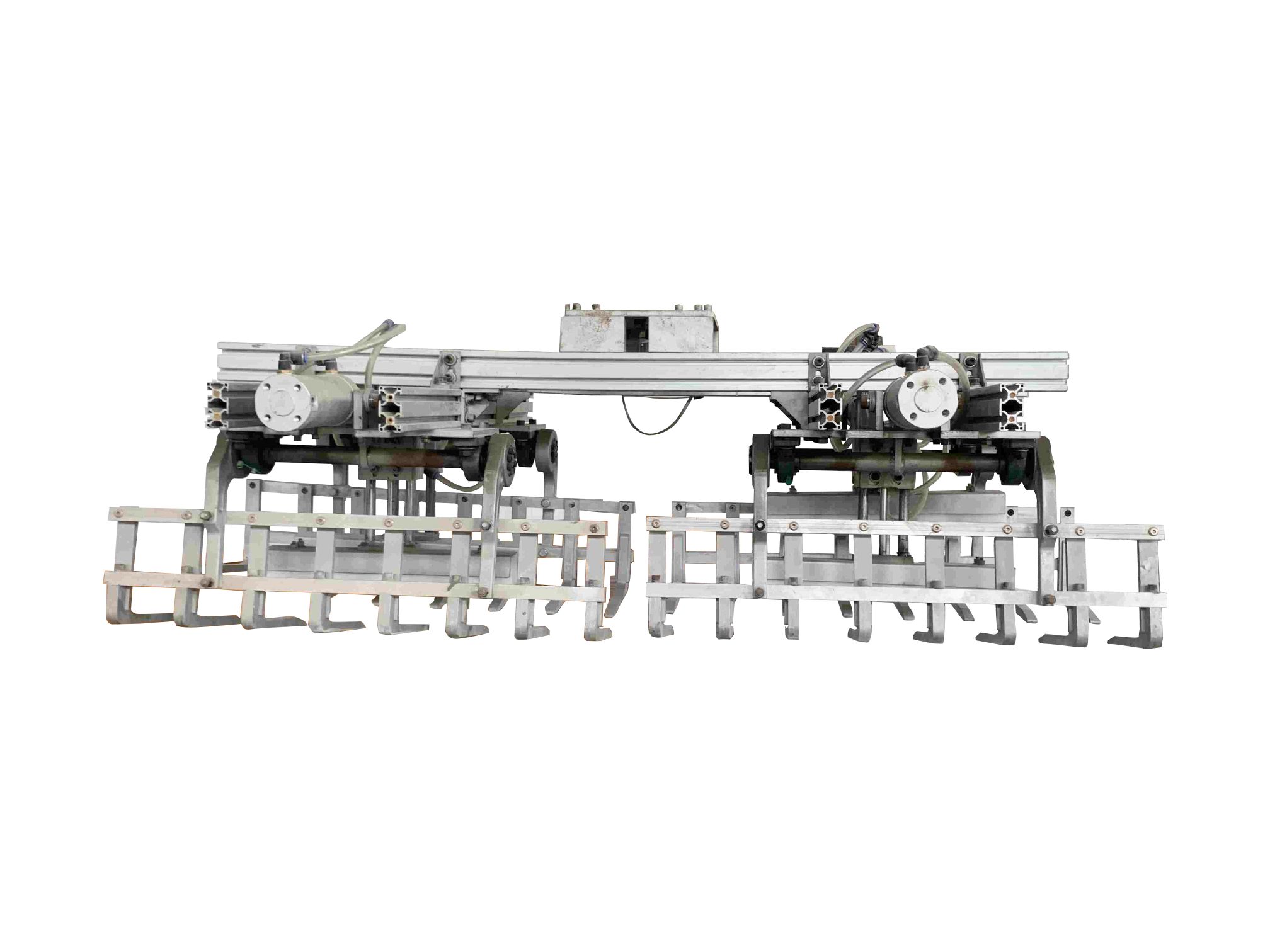




Robot à palettisation Double gripper
1. La conception à double griffe permet au robot de saisir deux éléments en même temps ou de saisir des éléments de positions différentes, réduisant efficacement le nombre de saisies et raccourcissant ainsi le temps de palettisation.
2. Généralement équipé d'un système d'entraînement plus puissant et d'une conception structurelle, les deux griffes fonctionnent ensemble pour disperser la charge et peuvent avoir un poids plus important.
3. Les deux griffes peuvent se déplacer indépendamment ou en coordination, et peuvent ajuster de manière flexible la méthode de saisie en fonction de la forme et de la taille des marchandises.
4. Les doubles griffes peuvent être affinées pour atteindre un positionnement et un placement plus précis lors de la mise en place de marchandises sur des palettes ou des emplacements désignés.
5. Les doubles griffes sont réparties symétriquement ou conçues selon les principes de la mécanique, qui peuvent mieux maintenir l'équilibre lors de la saisie des marchandises. Les doubles griffes peuvent compenser la force déséquilibrée des marchandises en ajustant la résistance et la position.
Il se compose de deux griffes indépendantes qui peuvent fonctionner ensemble. Les griffes sont généralement en alliage en aluminium à haute résistance ou en acier inoxydable. Ils ont des caractéristiques de poids léger, de résistance élevée et de résistance à la corrosion, et peuvent s'adapter à divers environnements de travail difficiles.
 Il est connecté à la fin du bras robotique du robot de palettisation à travers des articulations, des roulements et des dispositifs de transmission de haute précision pour assurer la stabilité et la précision des doubles griffes pendant le mouvement.
Il est connecté à la fin du bras robotique du robot de palettisation à travers des articulations, des roulements et des dispositifs de transmission de haute précision pour assurer la stabilité et la précision des doubles griffes pendant le mouvement.
 Le capteur de pression est utilisé pour surveiller la force de saisie des griffes en temps réel pour empêcher les marchandises d'être endommagées par une force de préhension excessive ou une chute en raison d'une force de préhension insuffisante; Le capteur de position peut faire une rétroaction avec précision la position et la posture des griffes.
Le capteur de pression est utilisé pour surveiller la force de saisie des griffes en temps réel pour empêcher les marchandises d'être endommagées par une force de préhension excessive ou une chute en raison d'une force de préhension insuffisante; Le capteur de position peut faire une rétroaction avec précision la position et la posture des griffes.

Différents modes de saisie peuvent être commutés de manière flexible en fonction de la forme, de la taille et du poids des marchandises, telles que l'accaparement parallèle, la saisie encerclée et la saisie de la pince latérale.
 Les doubles griffes peuvent ajuster automatiquement la force et la position de préhension en fonction de la situation réelle des marchandises. Lors de la saisie des marchandises plus légères, les griffes réduiront automatiquement la force de préhension pour éviter d'endommager les marchandises.
Les doubles griffes peuvent ajuster automatiquement la force et la position de préhension en fonction de la situation réelle des marchandises. Lors de la saisie des marchandises plus légères, les griffes réduiront automatiquement la force de préhension pour éviter d'endommager les marchandises.