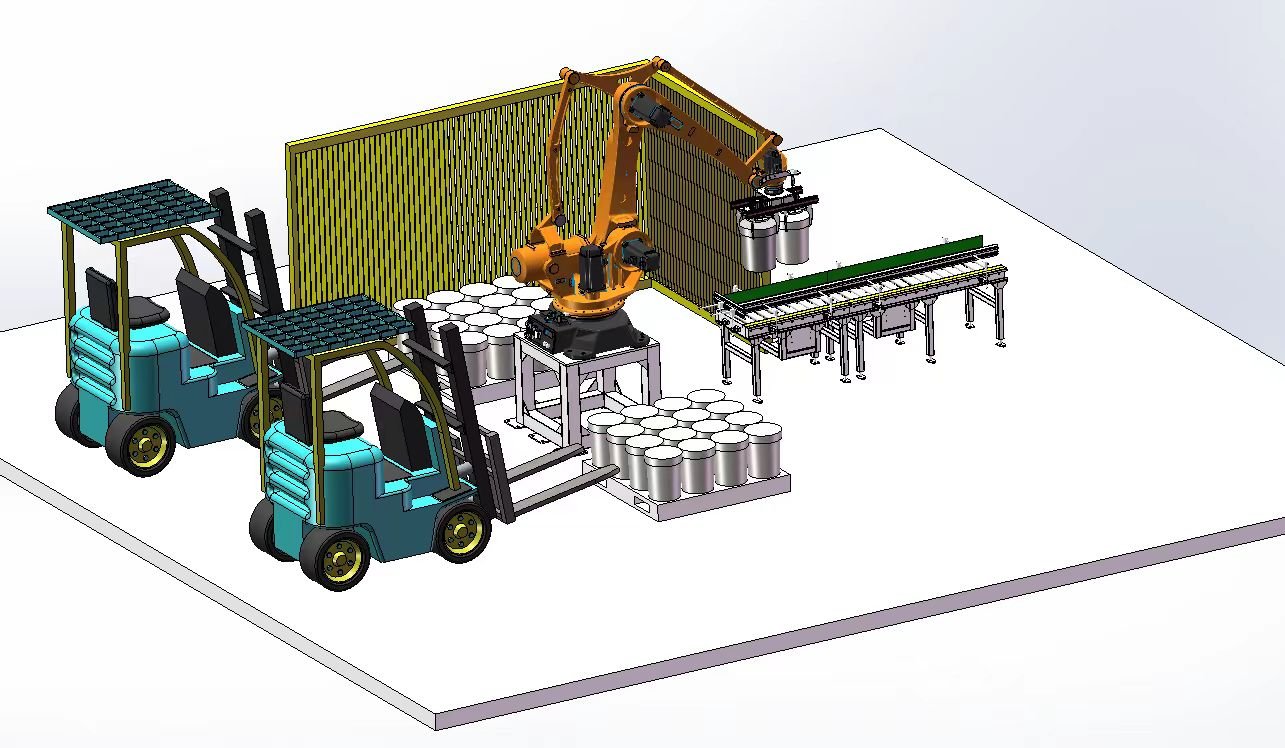



Palettiseur à joint automatique
La machine multi-articulée ressemble à un bras humain et se caractérise par sa capacité à se déplacer avec souplesse comme une main humaine. Par exemple, lorsqu'il rencontre un obstacle, le robot multi-articulé peut contourner l'obstacle pour atteindre la cible, ce qui est difficile pour le robot industriel général de type à coordonnées polaires ou cylindriques. Si certains mouvements spéciaux (mouvement de manivelle) doivent être effectués, le robot multi-articulé est également plus facile à réaliser. Un robot multi-articulé peut également se déplacer d’un point à un autre en aussi peu de temps qu’une main humaine. Si un robot multi-articulé est équipé de capteurs tactiles et de force dans ses mains et ses poignets, il peut effectuer des travaux de plus en plus complexes.
Lorsqu'une articulation du bras d'un robot multi-articulé tourne selon un angle, les autres articulations et leurs bielles produiront un mouvement dans l'espace. En conséquence, la griffe atteint une nouvelle position et la direction (attitude) de la position est également modifiée. Par conséquent, le robot multi-articulé général doit être contrôlé par ordinateur. Le robot dispose de détecteurs d'angle sur chaque articulation. Compte tenu de l’angle de rotation de chaque articulation, le problème de l’obtention de la position spatiale et de l’attitude de la griffe de la main est appelé problème d’analyse du contrôle du mouvement. Au contraire, compte tenu de la position et de l'attitude de la griffe, le problème de l'angle de rotation de chaque bielle commune est appelé problème de synthèse du mouvement. La clé de ces problèmes est de savoir comment utiliser l’ordinateur pour effectuer la transformation et le calcul ci-dessus.