
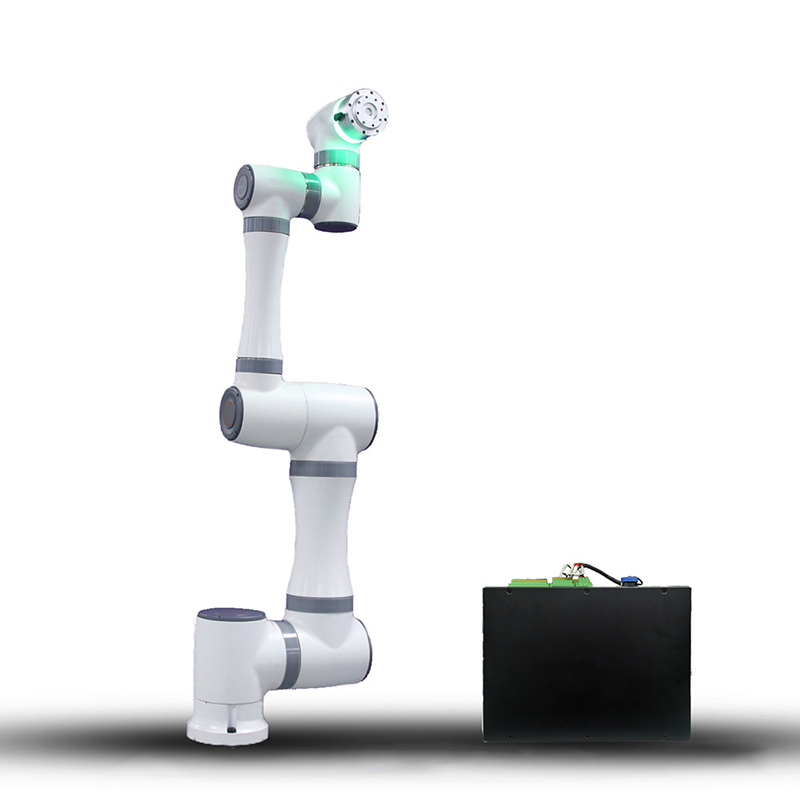



Bras robot collaboratif intelligent
1. Équipé de capteurs de force de haute précision, il peut détecter la force de contact avec le corps humain ou d'autres objets en temps réel. .
2. La surface du bras du robot est lisse, sans arêtes vives ni espaces, et les joints sont arrondis pour réduire le risque de pincement ou de rayure des opérateurs lors du contact.
3. Il a généralement plusieurs degrés de liberté, peut réaliser des trajectoires de mouvement complexes et diverses dans un espace tridimensionnel et peut atteindre de manière flexible différentes positions et angles.
4. Il utilise des matériaux légers et une conception compacte, est léger et est facile à déplacer et à installer. Il peut être rapidement déployé dans différents scénarios de travail.
5. Prend en charge le mode de programmation pédagogique. L'opérateur peut faire glisser manuellement le bras du robot vers la position et la posture cibles, enregistrer la trajectoire de mouvement et les paramètres d'action, et le bras du robot peut reproduire automatiquement le processus de fonctionnement.
Le bras robotique collaboratif intelligent est un équipement industriel innovant qui intègre une technologie avancée d'intelligence artificielle, une conception mécanique de précision, une détection multimodale et des fonctions efficaces d'interaction homme-machine.

Fabriqué à partir de matériaux légers et solides tels qu'un alliage d'aluminium à haute résistance ou de la fibre de carbone, le bras robotique présente une bonne rigidité tandis que son poids est efficacement contrôlé, permettant ainsi une réponse de mouvement rapide et flexible.

Il est équipé d'une grande variété d'effecteurs finaux rapidement remplaçables pour s'adapter à divers scénarios de tâches complexes. Pour la saisie et le fonctionnement de petites pièces, il est équipé de pinces pneumatiques ou électriques de haute précision, et les doigts de préhension sont fabriqués en matériaux spéciaux. matériaux flexibles et conception adaptative.

Un système de détection complet et avancé est intégré pour fournir un support clé pour une collaboration intelligente et un fonctionnement de haute précision. Des capteurs de force sont largement répartis dans les articulations et les effecteurs terminaux du bras du robot pour surveiller les informations de force et de couple du bras du robot pendant le mouvement et le fonctionnement en temps réel.

Avec un contrôleur de mouvement multi-axes hautes performances comme noyau, il exécute des algorithmes de contrôle intelligents optimisés pour une collaboration intelligente et un fonctionnement de haute précision. Dans le même temps, le système de contrôle prend également en charge une variété de protocoles et d'interfaces de communication.

L'utilisation d'algorithmes avancés d'apprentissage en profondeur et de technologie de vision par ordinateur permet au robot de percevoir et de comprendre intelligemment des environnements de travail et des objets opérationnels complexes.

Basé sur des algorithmes d'apprentissage par renforcement et des modèles d'apprentissage automatique, le bras robotique peut prendre des décisions autonomes et sélectionner la stratégie opérationnelle optimale dans différents scénarios de tâches.

Un algorithme de contrôle conforme avancé a été développé pour permettre au bras robotique de présenter une conformité et une flexibilité similaires à celles d'un bras humain lors de l'interaction avec l'environnement externe.

Il peut être largement utilisé dans différents maillons de production de plusieurs industries, telles que la fabrication électronique, la fabrication automobile, les équipements, l'entreposage logistique, l'éducation et la recherche scientifique, et peut s'adapter à divers types de tâches de travail et aux exigences de l'environnement de production.




