

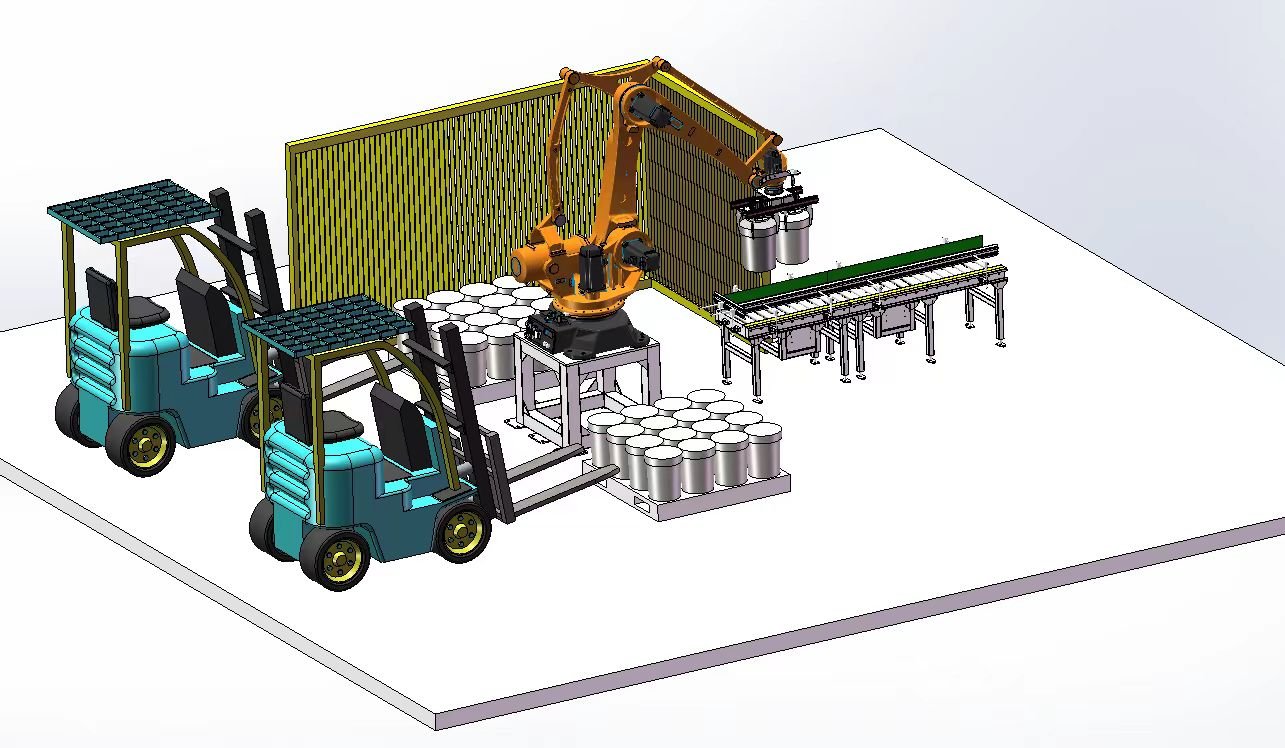



Palettiseur à joint automatique
La machine multiarticulée est similaire à un bras humain et se caractérise par sa flexibilité de mouvement, comparable à celle d'une main. Par exemple, face à un obstacle, le robot multiarticulé peut le contourner pour atteindre sa cible, ce qui est plus difficile pour les robots industriels à coordonnées polaires ou cylindriques. Si des mouvements spécifiques (manivelle) sont nécessaires, le robot multiarticulé est également plus facile à réaliser. Un robot multiarticulé peut également se déplacer d'un point à un autre aussi rapidement qu'une main humaine. Équipé de capteurs tactiles et de force au niveau des mains et des poignets, un robot multiarticulé peut réaliser des tâches de plus en plus complexes.
Lorsqu'une articulation du bras d'un robot multi-articulé pivote d'un angle, les autres articulations et leurs bielles produisent un mouvement spatial. La pince atteint alors une nouvelle position, dont la direction (attitude) est également modifiée. Par conséquent, le robot multi-articulé doit être contrôlé par ordinateur. Chaque articulation est équipée de détecteurs d'angle. Étant donné l'angle de rotation de chaque articulation, la détermination de la position et de l'attitude spatiales de la pince est appelée « problème d'analyse du contrôle du mouvement ». À l'inverse, étant donné la position et l'attitude de la pince, la détermination de l'angle de rotation de chaque bielle est appelée « problème de synthèse du mouvement ». La clé de ces problèmes réside dans l'utilisation de l'ordinateur pour effectuer les transformations et les calculs décrits ci-dessus.








